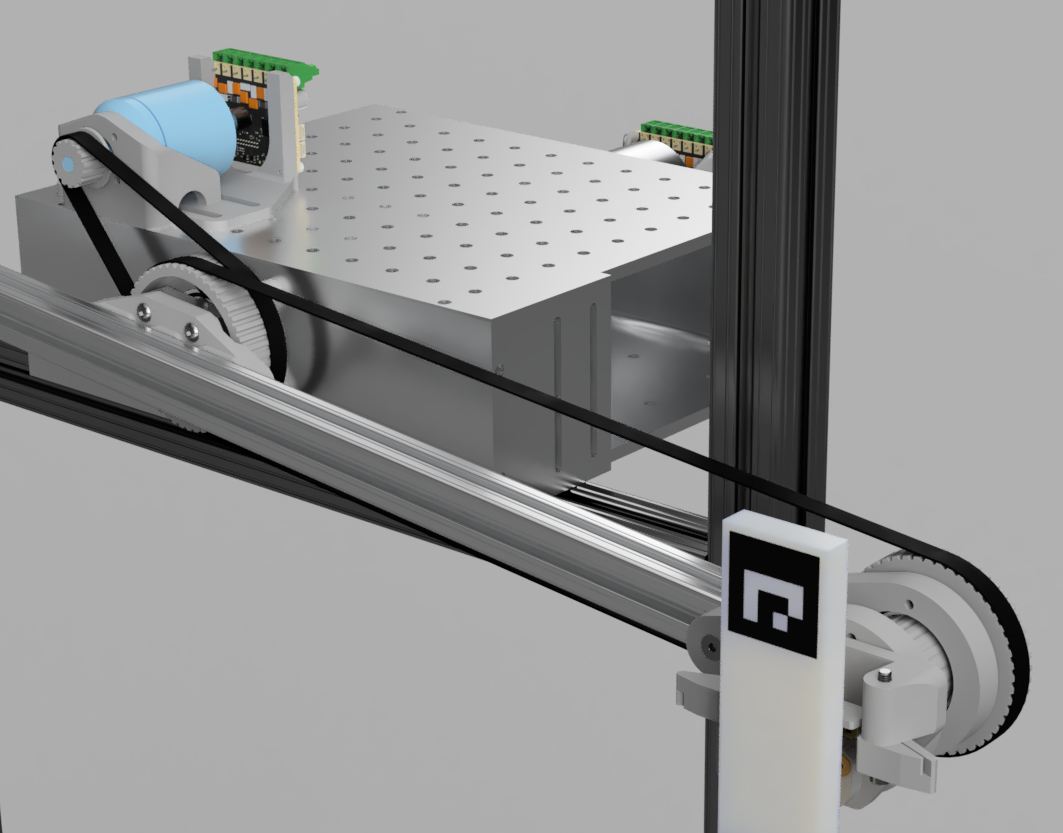
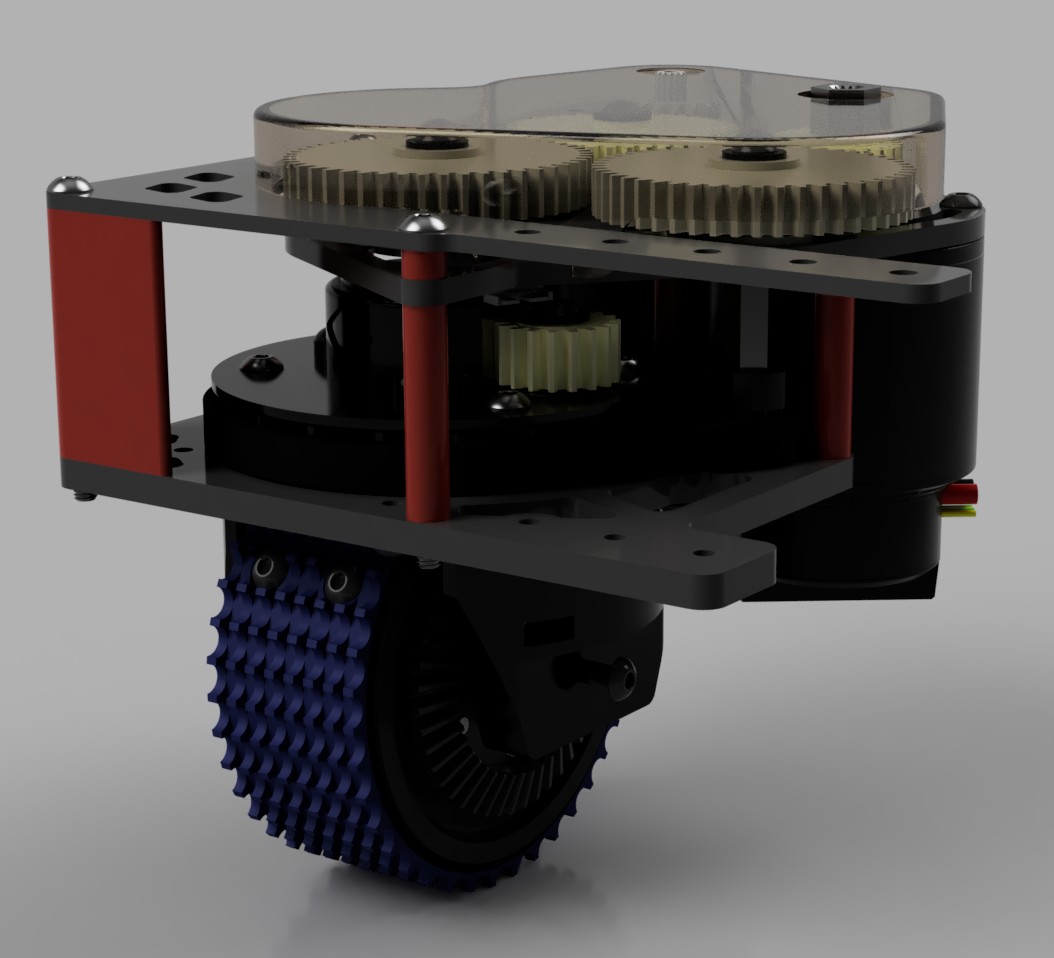
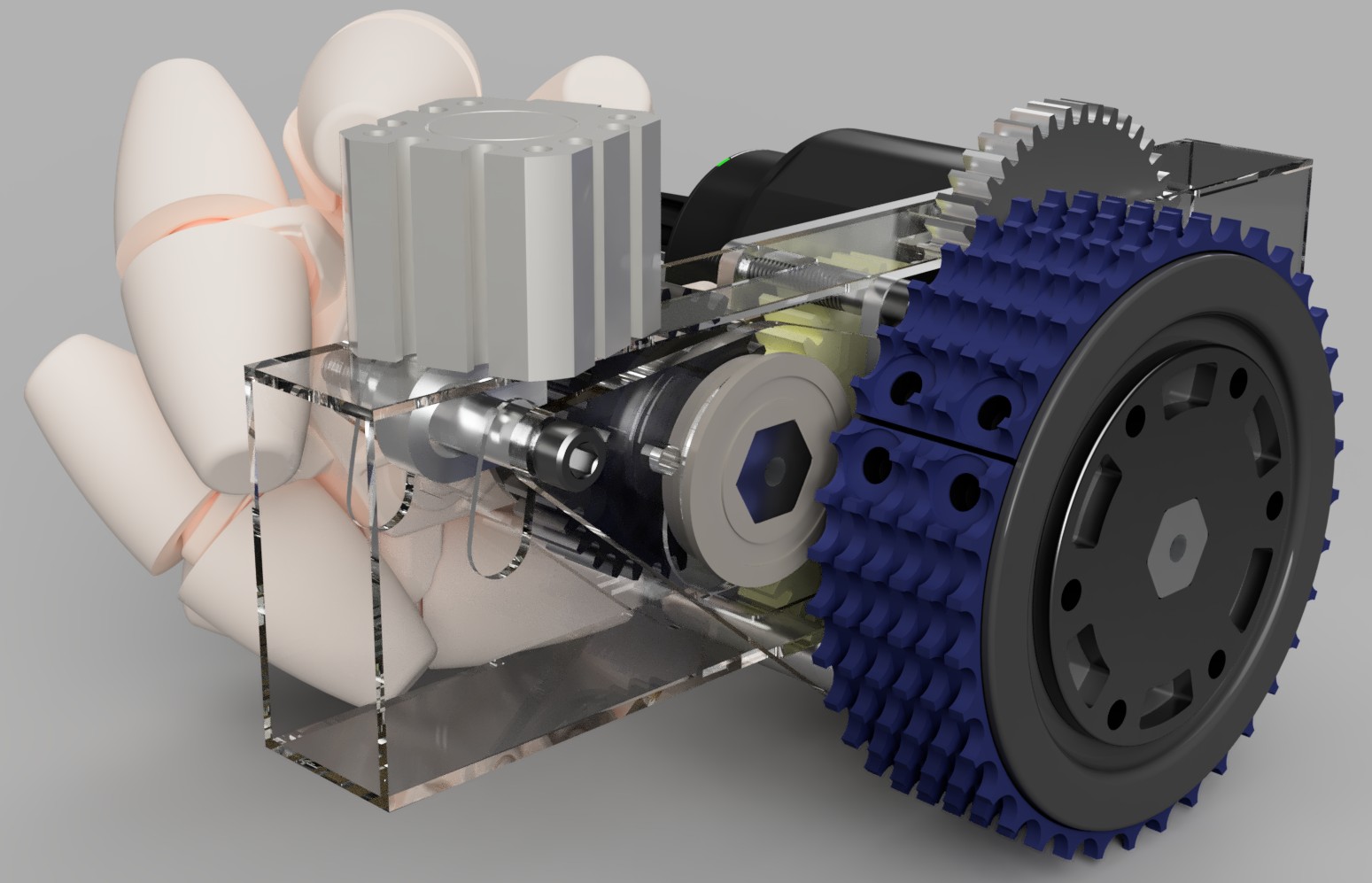
CNC & 3D Printed Coaxial Belt Drive
Adapting an existing metal chassis, a 3D printed belt system was designed to add a second degree of freedom, enabling rapid prototyping and discovery of angular momentum effects during throwing.
Supporting Meta hardware development via Sigma Design, I assemble, test, and document actuators, gearboxes, and mechanical systems. I engineer custom fixtures to improve assembly efficiency and provide hands-on design feedback in collaboration with mechanical engineers.
Learn more
Preferred 3D modeling software includes Fusion 360, with expertise in Autodesk Inventor, SolidWorks, Siemens NX, Onshape, and AutoCAD Plant 3D. Designed and modeled a limited-slip differential gearbox for OSU's Baja Team, integrating parts with CNC machining and FEA simulation for stress validation.
Learn more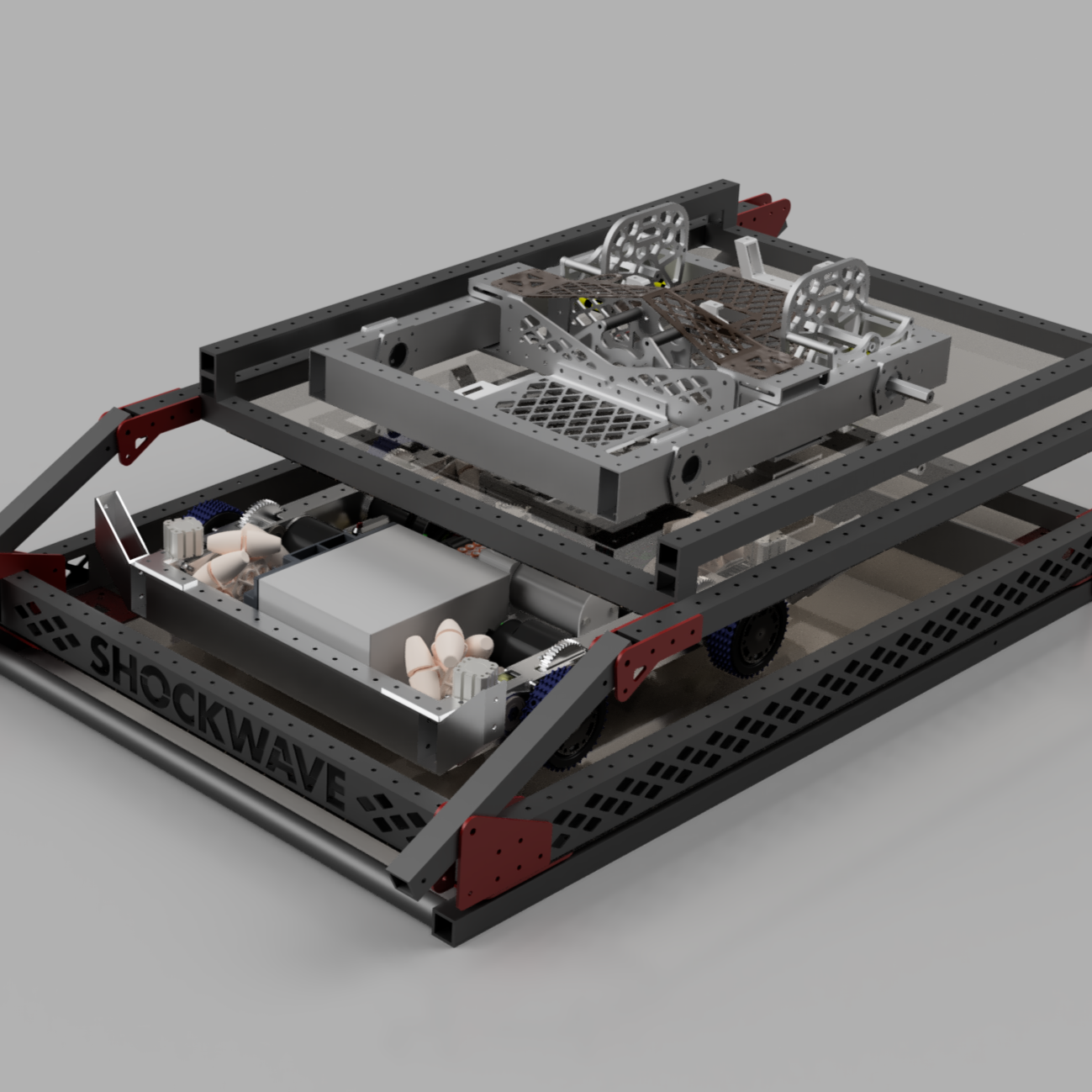
Led the mechanical team to design and prototype advanced robot systems, including swerve drive modules, mecanum shifters, and West Coast tank drives, contributing to Team 4488's successful participation in the FIRST Robotics Competition. Achieved 10th in the world, including 2018 World Galileo Division Champion.
Learn more
Conducted graduate research at the Laboratory for Robotics and Applied Mechanics, including modeling origami spring hex bellows, compliant Kinova arm control, and developing ODrive motor controllers as part of a thesis on isolating angular momentum in projectile throwing systems.
Learn more
Adapting an existing metal chassis, a 3D printed belt system was designed to add a second degree of freedom, enabling rapid prototyping and discovery of angular momentum effects during throwing.
Using ODrive motor controllers and CAN ROS2 communication, this project achieved synchronized 2DOF movement to isolate the effects of angular momentum during a projectile throw.
Fully documented on GitHub, utilizing a ROS2 package and an ESP32 pneumatic trigger via HTTP.
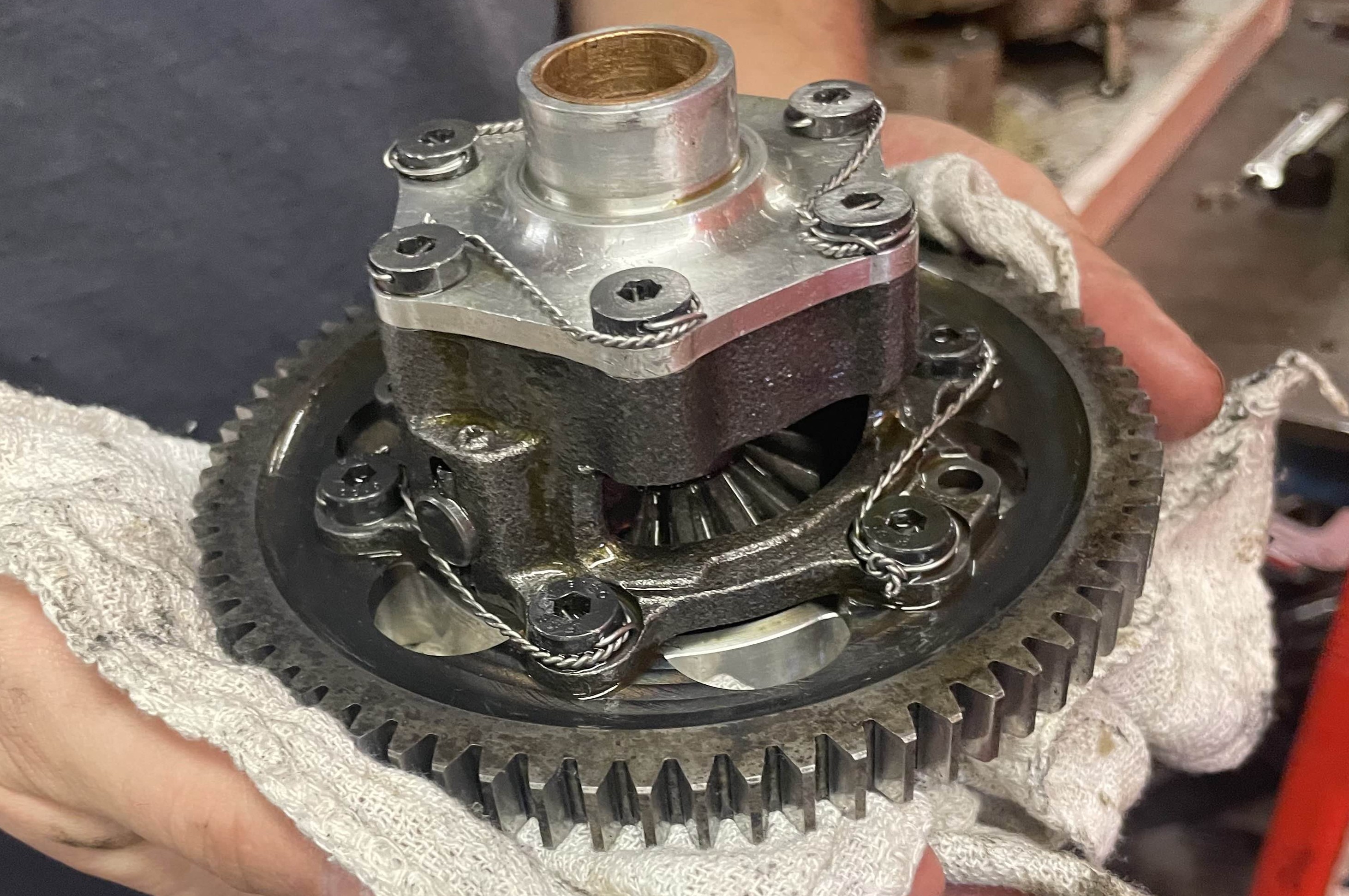
Redesigned a cast iron differential into a limited-slip configuration with an aluminum CNC body machined in-house. This prevents wheel spin-out when at least one wheel retains traction, improving vehicle control.
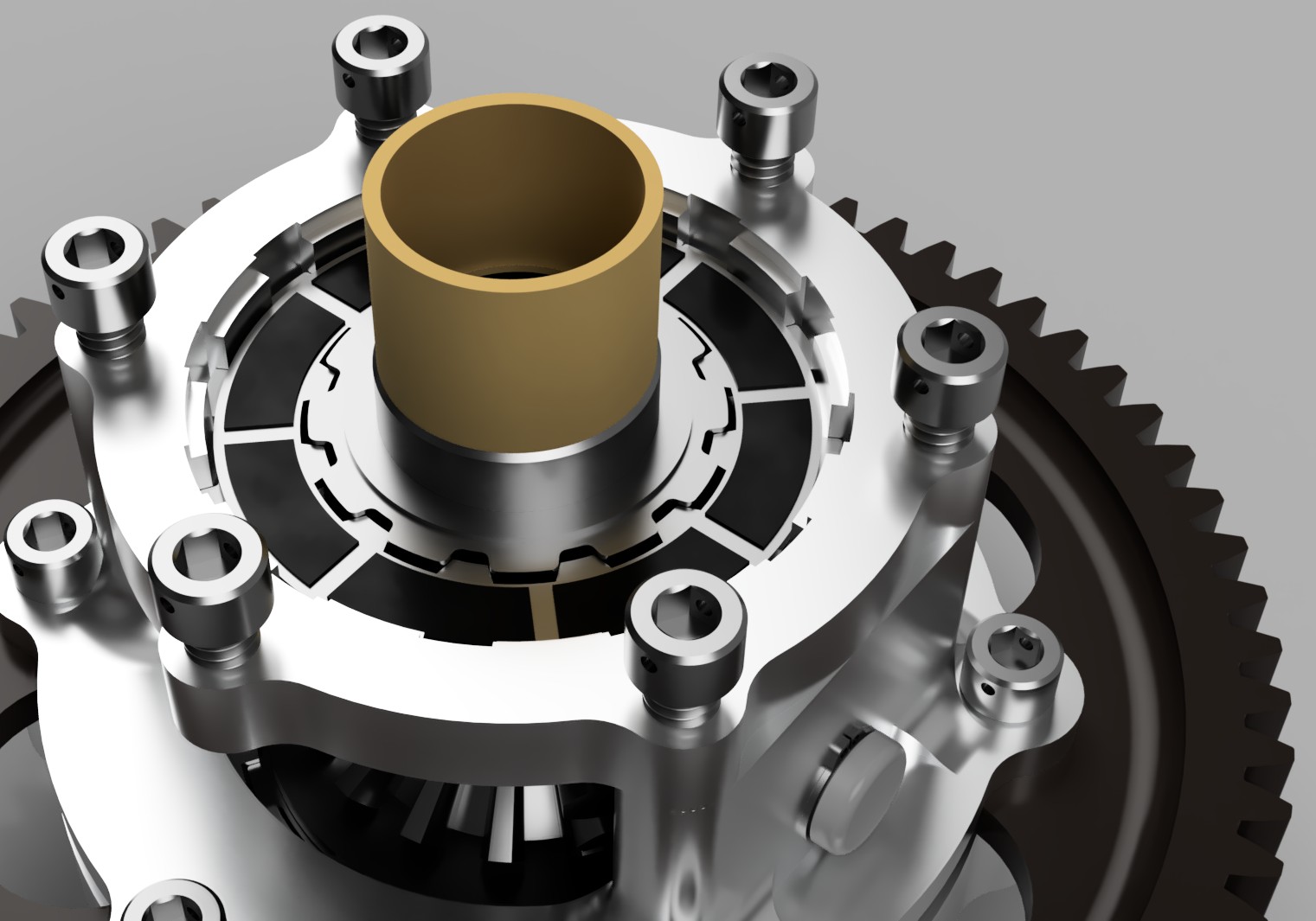
Limited-slip action is achieved with custom friction pads that compress and lock the gearbox when bevel gears expand under high torque whick is when there is a torque imbalance between the wheels.
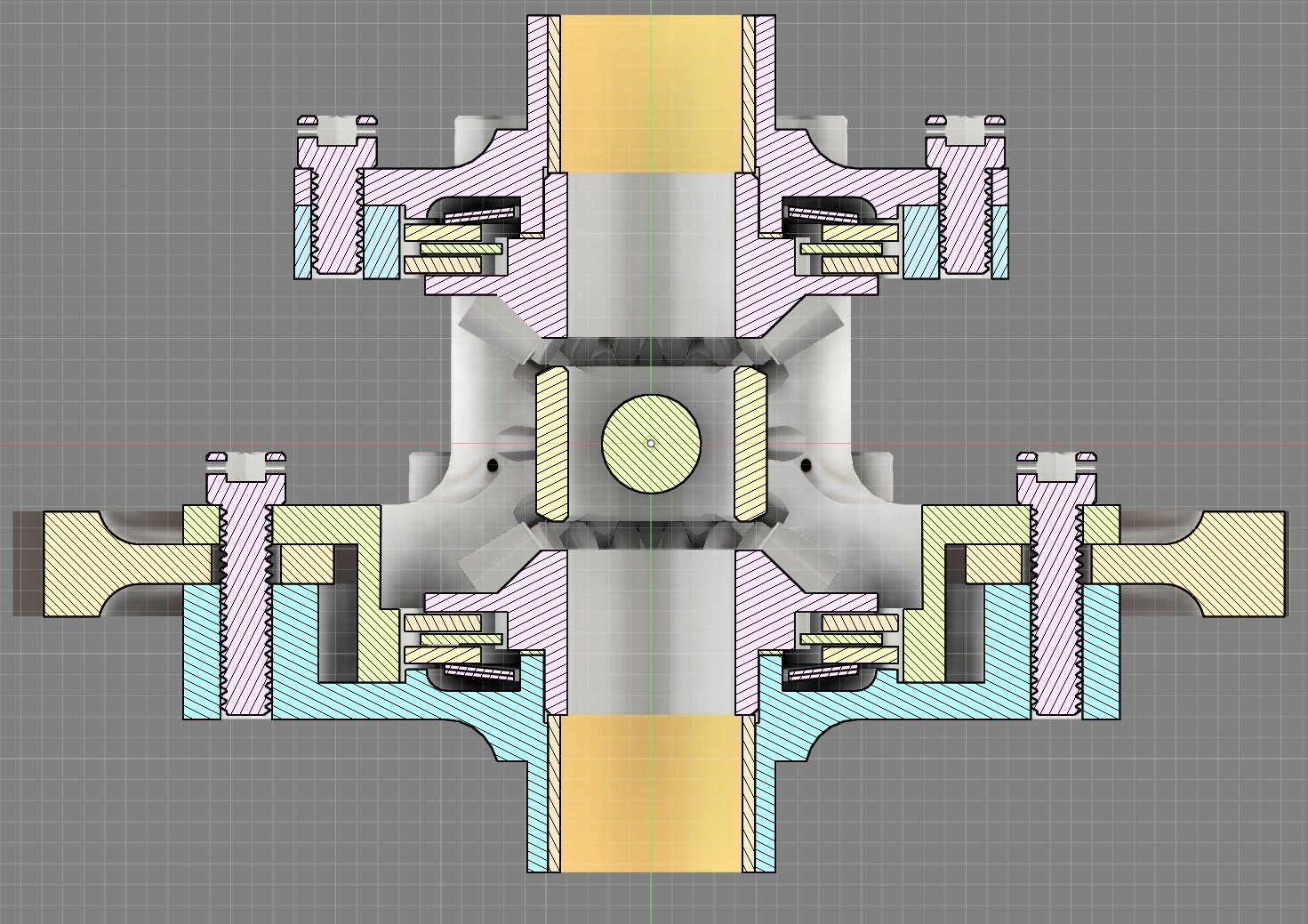
The module is precisely toleranced with interchangeable disc springs, allowing adjustable breakaway torque for different slip thresholds.

Developed detailed 3D models of industrial paper mill systems using point cloud scan data in Navisworks, Bluebeam Revu, and AutoCAD Plant 3D.
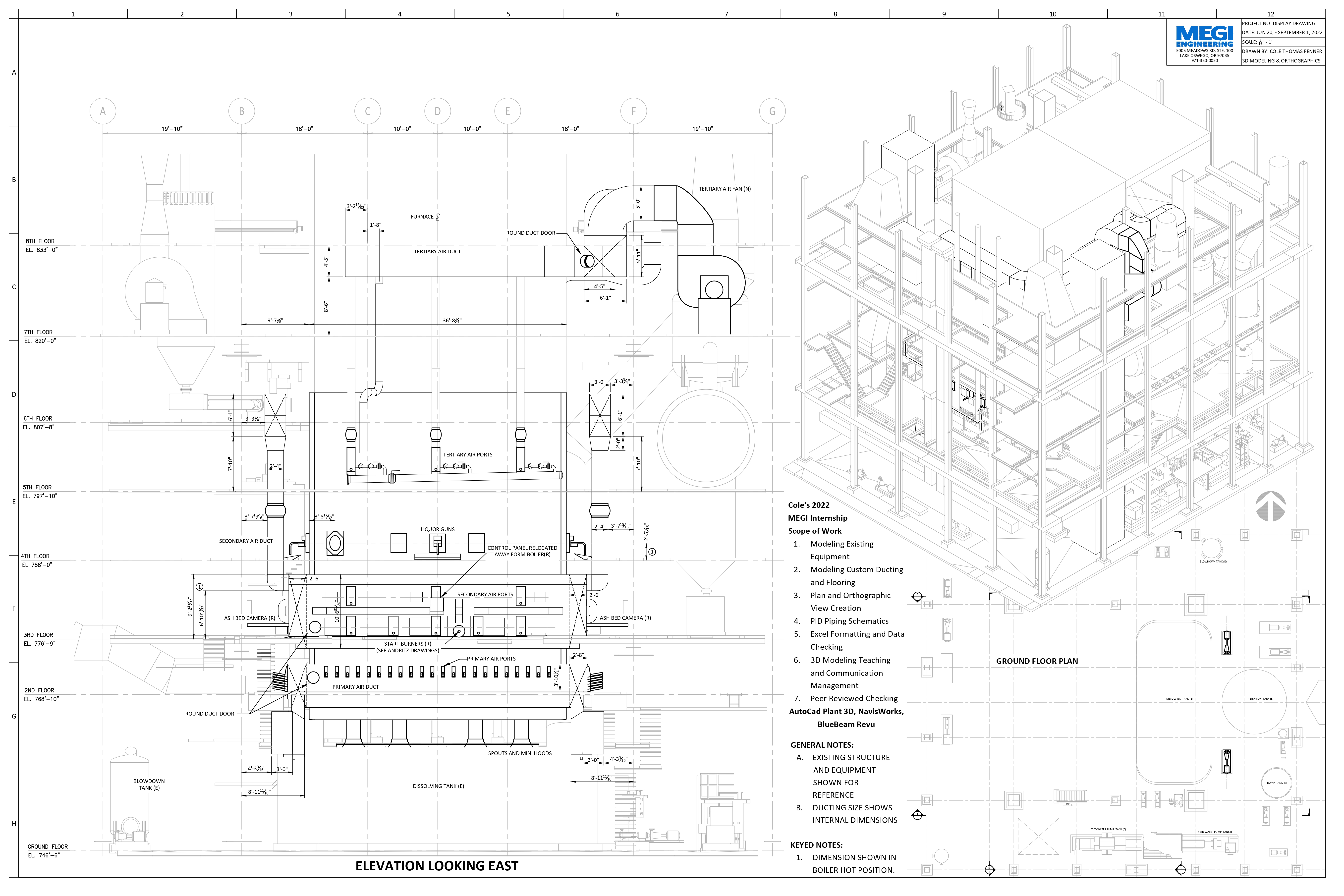
Created updated piping and electrical system drawings in AutoCAD (P&ID) to improve infrastructure documentation and adaptability.
Two-motor module drive system allowing each wheel to rotate in place, enabling instantaneous movement in any direction. This compact corner version is fabricated from CNC metal, polycarbonate, and 3D printed parts.
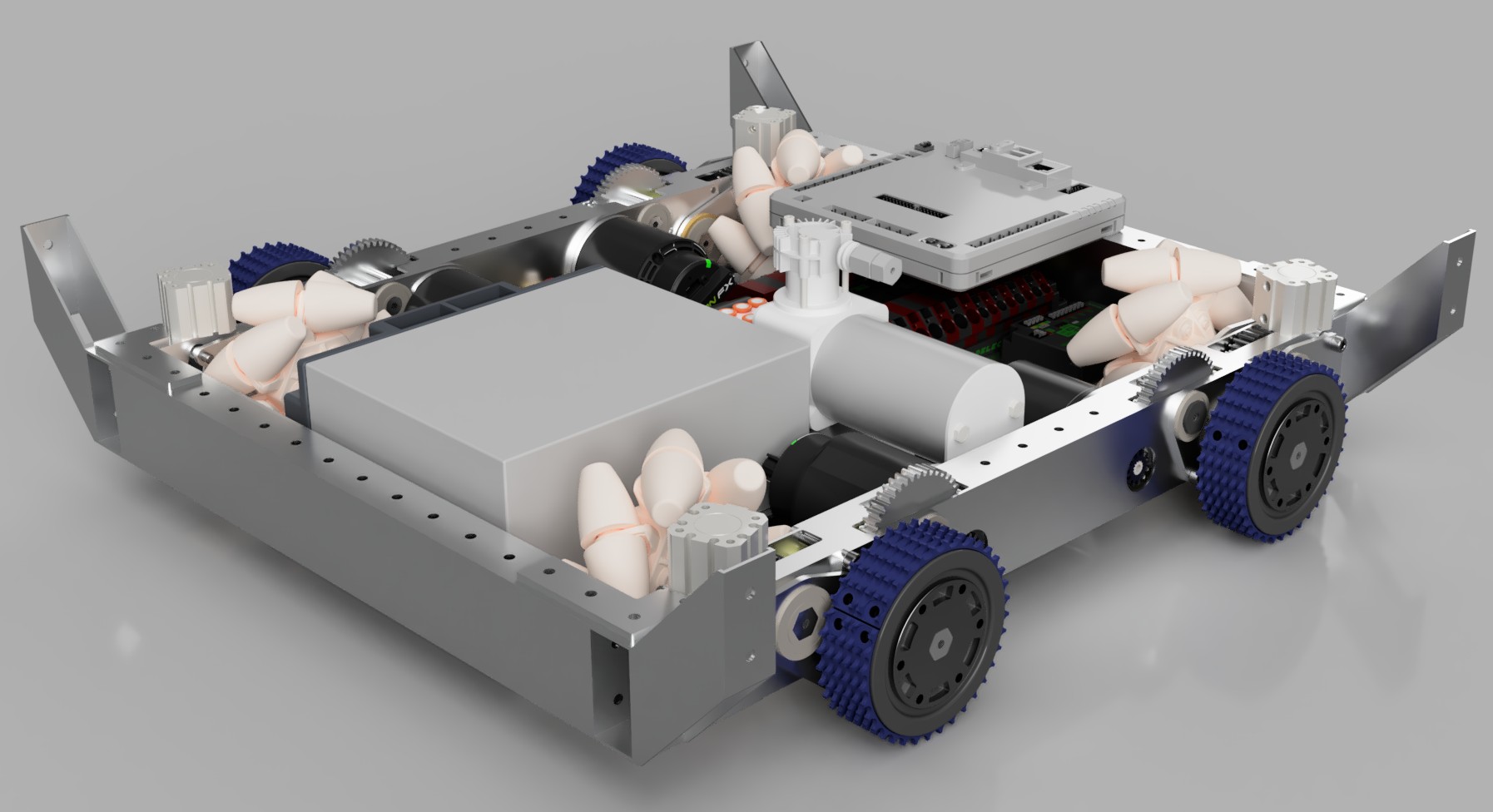
A complete pneumatic system used to shift between mecanum and traction wheels. The gearbox is designed inside a 2×1 aluminum bar for the most compact possible footprint.